東京, 3月24日, /AJMEDIA/
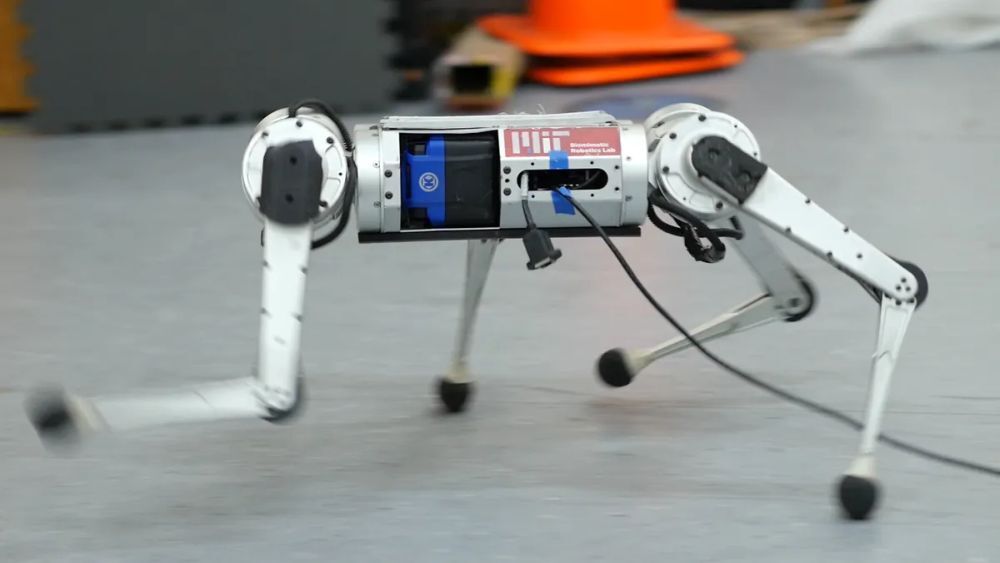
米マサチューセッツ工科大学(MIT)のコンピューター科学・人工知能研究所(CSAIL)が非常に高速で移動する四足歩行ロボットの新バージョンを公開した。4脚ロボットはここ数年、大きな注目を集めてきたが、意外なことに、ある平凡なスキルを獲得するのに苦労している。走ることだ。
その理由は、現実世界の環境で走ることは、極めて複雑な動作であるからだ。高速で移動するため、ロボットが困難な状況(滑りやすい表面や物理的な障害物、起伏のある地形など)に直面した場合、体勢を立て直したり、適応したりする余地はほとんどない。さらに、走る動作の負荷により、ハードウェアのトルクと負荷は限界に達する。同研究所の博士課程の学生であるGabriel Margolisさんと人工知能および基本相互作用研究所(IAIFI)の博士研究員であるGe Yangさんは先頃、MIT Newsに以下のように語った。
そのような状況では、ロボットの力学を解析的にモデル化するのは困難だ。ロボットは環境の変化(例えば、芝生の上を走っているときに氷に出くわした瞬間)に迅速に対応する必要がある。ロボットが歩いている場合は、動作がゆっくりなので、雪があっても通常は問題にならない。自分がゆっくりと注意深く歩いているところを想像してみてほしい。ほぼどんな地形でも移動できるはずだ。今日のロボットも同じような問題に直面している。問題なのは、どんな地形でもまるで氷の上を歩いているかのように進んでいくのは非常に効率が悪いにもかかわらず、今日のロボットではそれが広く行われている、ということだ。人間は芝生の上では速く走り、氷の上では速度を落とす。私たちは適応する。ロボットに同様の適応能力を与えるには、地形の変化を瞬時に特定し、即座に適応してロボットの転倒を防げるようにする必要がある。要約すると、考えられるすべての地形に対して、(人間によって設計された)分析モデルを事前に構築することは非現実的であり、ロボットの力学も速度とともに複雑さが増すので、高速で走ることは、歩くことよりも困難であるということだ。
MITの最新の「Mini Cheetah」がほかと異なるのは、アプローチの仕方だ。MITの過去の「Cheetah 3」やMini Cheetahは、人間のエンジニアたちによって設計されたアジャイルランニングコントローラーを使用していた。エンジニアたちは、移動の際の物理的現象を分析して、不足していた抽象概念を定式化し、特殊なコントローラーの階層構造を実装することで、ロボットがバランスを取りながら走れるようにした。これは、Boston Dynamicsのロボット「Spot」が動作する原理と同じである。
最新のMini Cheetahのシステムでは体験のモデルを利用して、リアルタイムで学習する。Mini Cheetahは、自らの単純なニューラルネットワークをシミュレーターで訓練することで、多様な地形に関する100日分の体験をわずか3時間で獲得できる。
MargolisさんとYangさんは、「われわれは、シミュレートされた体験に基づいてロボットの行動を改善するアプローチを開発した。重要なのは、このアプローチでは、学習した行動を現実の世界にうまく展開することも可能だということだ」と説明する。
「ロボットが現実世界でもランニングスキルを発揮できるという直感は、シュミレーターの中でロボットが体験する環境に、現実世界で役立つスキルを教えてくれるものが含まれているという事実から生まれたものだ。現実世界での運用においては、コントローラーが必要なスキルをその場で特定して実行する」
もちろん、ほかの優れた学術研究と同様、Mini Cheetahも最終的な製品ではなく、どちらかと言うと概念実証と開発作業である。ここで重要なのは、どれだけ効率的に、ロボットに現実の世界の対処をさせられるのか、ということだ。効率的な運用に、人間による監視と入力が必要なやりかたでは、普及させるのは難しいとMargolisさんとYangさんは指摘する。
簡単に言うと、手作業でのプログラミングは労働集約的であり、シミュレーションやニューラルネットワークがそれよりもはるかに速く仕事を遂行できるようになりつつあるということだ。過去数十年のハードウェアとセンサーが今になって潜在能力を最大限に発揮し始めており、ロボットたちが道ばたを歩く新時代の到来を告げている。
ことによると、走るかもしれないけれど。